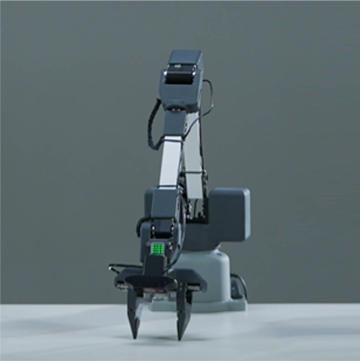
myArm M&C四足機(jī)器人復(fù)合套件 產(chǎn)品特性 前往淘寶 前往京東 應(yīng)用場(chǎng)景 四足機(jī)械臂復(fù)合套件結(jié)合了四足機(jī)器人的靈活移動(dòng)能力和機(jī)械臂的操作精度,提供了一個(gè)通用的適合探索、研究和多環(huán)境應(yīng)用的高度集成化平臺(tái)。 如:復(fù)雜地形探索模擬; 自動(dòng)化農(nóng)業(yè)應(yīng)用探索; 實(shí)驗(yàn)室或教室教學(xué)。 產(chǎn)品功能 四足機(jī)器人與機(jī)械臂集成 提供多維度操作能力,模擬復(fù)雜環(huán)境下的任務(wù)執(zhí)行。 便捷安裝和連接 簡(jiǎn)化設(shè)置過程,無需外置控制器即可快速啟動(dòng)。 支持多種開發(fā)環(huán)境 包括Python和ROS,滿足不同開發(fā)需求。 平衡算法驗(yàn)證 提高機(jī)器人的穩(wěn)定性和操作精度。 動(dòng)力學(xué)開發(fā)支持 適用于高級(jí)運(yùn)動(dòng)分析和應(yīng)用開發(fā)。 標(biāo)準(zhǔn)化通信協(xié)議 確保設(shè)備間高效、穩(wěn)定的數(shù)據(jù)交換。 產(chǎn)品包裝內(nèi)容 myArm C650機(jī)械臂 X 1 ———————————————————————————————————————— myArm M750機(jī)械臂 X 1 ———————————————————————————————————————— 四足機(jī)器狗 X 1 ———————————————————————————————————————— 24V5A電源適配器 X 1 ———————————————————————————————————————— 12V5A電源適配器 X 1 ———————————————————————————————————————— USB數(shù)據(jù)線 X 2 ———————————————————————————————————————— DC電源轉(zhuǎn)接線 X 1 ———————————————————————————————————————— 軟件編程開發(fā) myArm系列機(jī)械臂在教育和科研領(lǐng)域中極具價(jià)值,特別是在Python和ROS(Robot Operating System)這兩個(gè)廣泛使用的開發(fā)環(huán)境中。這些環(huán)境提供了強(qiáng)大的支持,使得myArm系列產(chǎn)品能夠廣泛應(yīng)用于機(jī)器學(xué)習(xí)、人工智能研究、復(fù)雜運(yùn)動(dòng)控制以及視覺處理任務(wù)中。 Python ROS myArm M&C雙臂遙操作機(jī)械臂套件 機(jī)器人雙臂遙操作實(shí)時(shí)控制套件 了解更多 myArm M&C 具身人型復(fù)合套件 具身人型雙臂遙控機(jī)器人控制套件 了解更多 myArm C650 通用型6自由度機(jī)器人運(yùn)動(dòng)信息采集裝置 了解更多 myArm M750 通用型智能6自由度機(jī)械臂 了解更多 myArm M&C 四足機(jī)器人復(fù)合套件 通用型四足機(jī)械臂復(fù)合機(jī)器人套件 了解更多

合套件-3.png)
器人與機(jī)械臂集成.png)

支持.png)
力學(xué)開發(fā)支持.png)
準(zhǔn)化通信協(xié)議.png)